Roboty a ich využite – Robotika , definícia
Roboty ,SMA pohony pre roboty ,Servopohony ,Priemyselný robot Robotyka , Definícia vysvetlenie . Roboty rozdelenie , ako pracujú …
Robot je univerzálny automat pre vykonávanie pohybov, pričom sa pohyby vykonávajú v niektorých osiach. Je charakteristický tým, že je programovateľný, realizuje veľké množstvo činností, má senzory, chápadlá a nástroje.
Priemyselný robot je automatický stroj, predstavujúci súbor výkonných mechanizmov a programovateľného riadiaceho systému na realizáciu motorických funkcií vo výrobnom procese.
Obsah článku:
Bloková schéma priemyselného robota
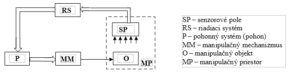
Senzorové pole (SP) – snímače informujú o stave agregátov robota a jeho pracovného okolia. Využívajú sa indukčné, kapacitné, optické, ultrazvukové, odporové a iné systémy.
Riadiaci systém (RS) – zabezpečuje riadenie jednotlivých pohonov, ktoré vykonávajú jeho vlastný manipulačný pohyb a zároveň aj koordináciu s okolím t.j. technologickou scénou. Technologickú scénu tvoria pracovné stroje, dopravné pásy, polohovacie zariadenia, prípadne ďalšie roboty. Riadiaci systém obsahuje merací, regulačný, ovládací, monitorovací a diagnostický subsystém. Syntézou riadiacich obvodov sa zaisťuje požadovaná kvalita riadenia pohonu v statických a dynamických stavoch.
Pohonný systém – pohon (P) – je celok, ktorý sa skladá z motora, vedení, obvodov zabezpečujúcich správny chod motora, prevodového mechanizmu a samostatného pracovného orgánu. Pohon zabezpečuje presnú manipuláciu v priestore a presnú rýchlosť a zrýchlenie.
Manipulačný mechanizmus (MM) – je mechanická konštrukcia, ktorá sa skladá zo sústavy ramien. Ramená sú samostatne ovládané a robia posuvné a rotačné pohyby. Manipulačný mechanizmus sa skladá zo stojana s ramenami, ruky alebo zápästia, konca ruky s chápadlom alebo s technologickou hlavicou.


Mastné vlasy : 5 domácich liekov
Chápadlo – umožňuje bezpečné uchopenie polotovaru a jeho premiestnenie maximálnou rýchlosťou z bodu A do bodu B.
Chápadlá podľa spôsobu uchopenia delíme na:
a) s pasívnym uchopením:
– mechanické ( pružné čeľuste a opierky)
– magnetické ( permanentné magnety)
– podtlakové (deformačné prísavky)
b) s aktívnym uchopením:
– mechanické čeľuste (s hydraulickým, pneumatickým, elektromagnetickým, elektromotorickým pohonom)
– magnetické (elektromagnet)
– podtlakové alebo pretlakové (ohybné prsty, podtlakové komory)
Využitie snímačov v súčasných motorových vozidlách
Základné rozdelenie pohonov pre roboty
Pohony pre roboty delíme na:
a) elektrohydraulické pohony
b) elektropneumatické pohony
c) elektrické pohony
– striedavé pohony
– servopohony
Servopohony – predstavujú najvyššiu úroveň riadenia pohybového systému. Úlohou servopohonu je uviesť poháňaný pracovný mechanizmus predpísaným spôsobom do pohybového stavu tak, aby bola pracovným mechanizmom zrealizovaná požadovaná technologická operácia alebo zaistený technologický proces s požadovanou kvalitou.
Servopohon sa skladá z :
– riadiaceho systému
– elektrického meniča
– mechanického meniča
– napájacieho zdroja
– pracovného stroja
– motora
Servopohony môžu byť vybavené:
– asynchrónnymi motormi
– synchrónnymi motormi
– krokovými motormi
SMA pohony pre roboty
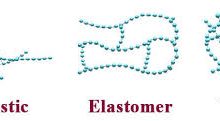
Zliatiny s tvarovou pamäťou (SMA – shape memory alloys) majú schopnosť „zapamätať“ si určité, aj komplikované tvary a tieto striedavo zaujímať vždy pri ohreve alebo pri ochladení (na základe zmeny teploty) a konať tak pri tom mechanickú prácu, no vždy len v jednom smere. Využíva sa pri tom tzv. jednocestný a dvojcestný pamäťový efekt intermetalických zlúčenín ako sú napr.: NiTi (nikel- titán), CuZnAl (meď –zinok – hliník), CuAlNi (meď – hliník – nikel) a ďalšie. SMA sa využíva v robotických pohonoch, v ktorých je možné určiť polohu riadením teploty.
Pohyby je možné riadiť elektrickým ohrevom. SMA sa využíva v oblasti mikrorobotov, mikromanipulátorov, chápadiel, umelých prstov a iných. Vyhotovenie pohonov SMA je veľmi rozmanité. Medzi základné typy patri: drôt, tyč, pásik, pružina a všeobecný tvar. Použitie SMA drôtu vo funkcii pohonu je znázornené na nasledujúcich obrázkoch.
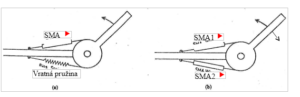
Prvý zo znázornených pohonov obr. a) využíva vratnú pružinu alebo iný pružný materiál. Zahrievaním SMA drôtu sa dáva rameno do pohybu, do pôvodnej polohy ho vráti vratná pružina. V druhom prípade obr. b) sú dva drôty SMA1 a SMA2, v závislosti od zahrievania SMA1 a SMA2 sa rameno pohybuje vpravo alebo vľavo.
Z hľadiska návrhu SMA pohonu pre robot sú rozhodujúce vlastnosti ako: veľkosť a opakovateľnosť vratnej deformácie (predĺženie), teplotný rozsah SMA javu, veľkosť sily, dovolené zaťaženie, dosiahnuteľný počet pracovných cyklov (nad 10 000), veľkosť časovej odozvy a spôsob chladenia.
Vo všeobecnosti možno povedať, že SMA pohony dokážu pôsobiť veľkou silou na relatívne malej dráhe. Tvarová prispôsobivosť umožňuje konštruovať pohony šité na mieru, ktoré bez mechanických prevodov majú výborný pomer výkonu ku hmotnosti. Sú veľmi spoľahlivé a odolné voči náročným prostrediam. Vynikajú v oblasti do 100 g a sú konštrukčne jednoduché.